Things got interesting.
As mentioned in the previous post about WiGLE and the AtomGPS device, I used phones as my only source of gathering with the tiny exception long ago of ministumbler. I have, since that post, become more enamored with the AtomGPS itself especially with the code improvements and community around it. I did want more, and especially other frequencies, so how would I be able to do that?
Another phone, of course! No, really, I had a blind spot for the newer WiFi 6E spectrum, and in discussion this year with El Kentaro it seemed like the Pixel 6 series was a step up from what I was using in several ways. Not only was it a faster device, with custom Google Tensor silicon, tons of RAM, and direct support, but it had the radios I wanted to look into the third spectrum. So, the search began, then stopped, then started, and stopped, and I finally picked one up.
Is it great? Mostly. Is it seeing more networks? Yes. Would I recommend it as a single device? Definitely. Is it the subject of this post?
No.
While having a “main” phone device is a good thing, because it’s self-contained and has many functions apart from WiGLE, there were still other projects out there that piqued my interest. This is a big community, and its members have many ideas, some of which are approachable (AtomGPS) while others are insane and awesome (Lozaning, Mr. Bill, BusySignal, others). I wanted something that could do what a typical phone could do but be dedicated solely to the task. This meant GPS, Bluetooth, 2.4 and 5GHz. The big one that I am always willing to pass on is GSM because, well, who’s counting those?!
Sweet Spot
I’d seen hints of several neat standalone devices, but one kept surfacing as the most interesting option. The JHewitt devices, as they’re known in the community, are compact units based on a PCB designed by the owner of wardriver.uk . This PCB allows for the use of two ESP32 boards, a GPS module, temperature sensor, GSM module, a microSD card interface, and an LCD. This is all housed in a 3D printed enclosure with two or three protruding antennae.
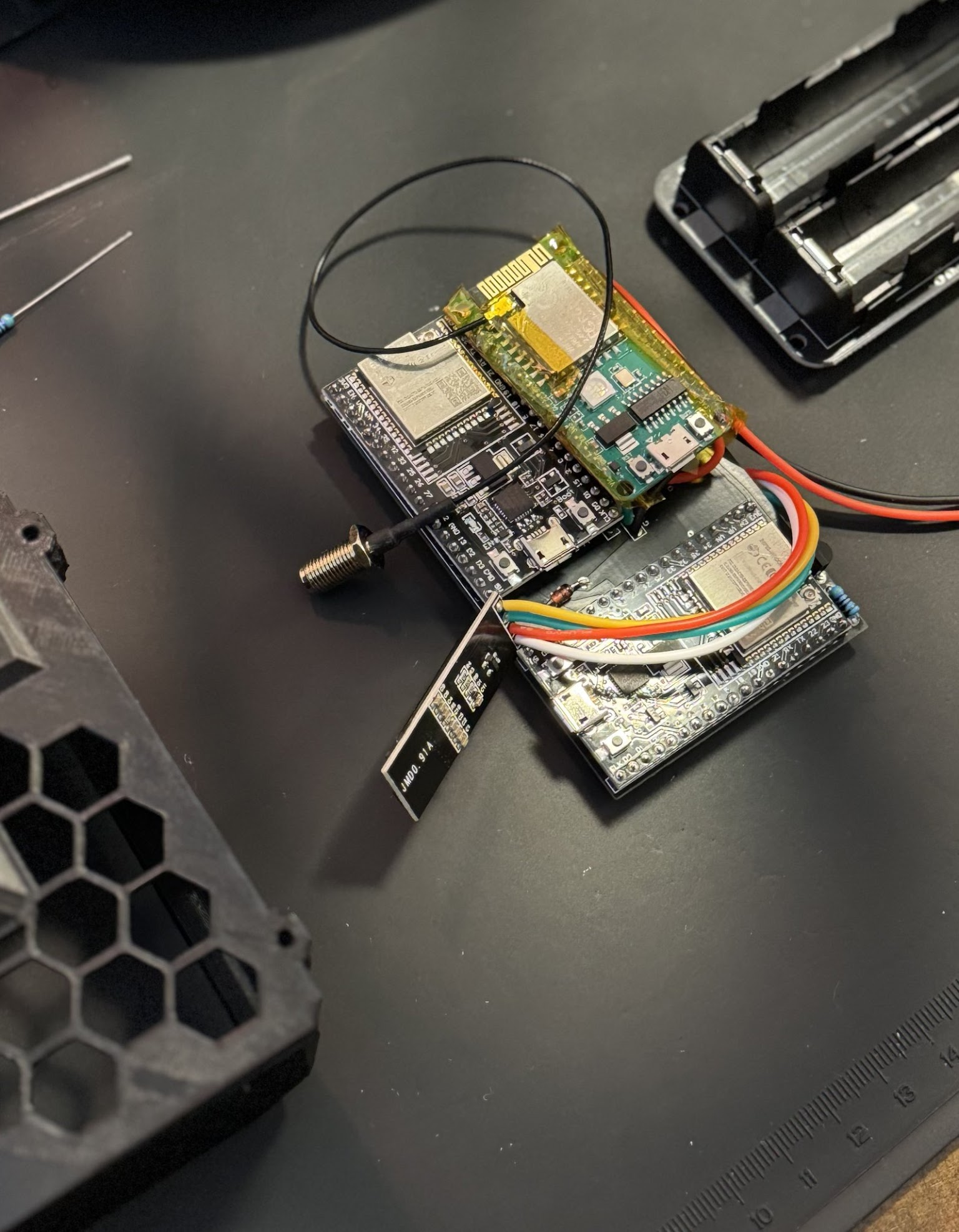
This unit can then be built around the PCB, using the BOM, and used for wardriving as-is. The larger antennae, at least compared to a typical modern smartphone, should be able to hear those fainter transmissions, but in the basic setup they only listen in on 2.4GHz, BT, and GSM. This was a drawback to me because all modern wireless systems use at least two frequencies, and I wanted more. When I got word that a 5GHz mod with the BW16 was available my ears perked up and I was now very interested.
One of the primary code developers for the AtomGPS Wigler build, Luke Switzer, had shown off some of his builds in the past, but also mentioned that he had some components ready to assemble for eager users. This piqued my interest, and after a few inquiries a build was agreed upon. It turned out that this was the first of this configuration for Luke, and I’m happy to say it was featured on his Twitter account during the assembly and testing. I was very eager to get this custom build and join the crew of those who rock a fully capable wardriving rig that’s self-contained.
I do mean it when I say that this is a standalone unit because it features some incredible software and hardware. The most loved feature of this build is that it has two 18650 batteries powering it, with charging built in, and it’s fully protected from overdraw. I really like the AtomGPS, but powering it from an external battery is a hassle. This community-sourced solution not only means that the 3D-printed case fully supports the battery module, but it’s one cohesive unit that has the feel of a small FRS or HAM radio. This is a good thing, because it’s meatier in the hand while being very balanced.
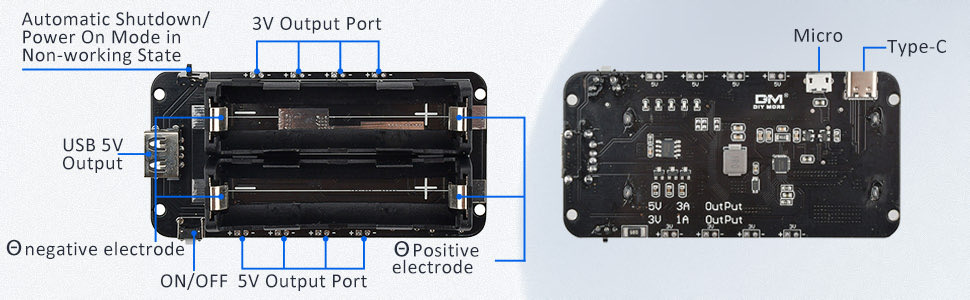
A side-benefit? The diymore V8 has an external USB-A 5V port for powering other devices. I think that I’m going to use this for powering my AtomGPS once I figure out how to keep it all in one package.
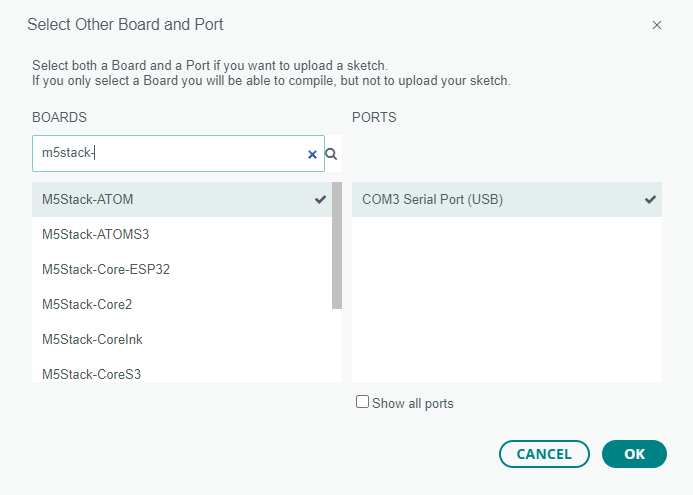
On the software side it’s even more interesting and impressive. The initial setup is all through an onboard web interface where the new user connects to an onboard, ad-hoc AP and web server. It prompts for a known network to connect to for NTP sync and software updates, and a fallback network configuration for use after the initial setup. This works very well and the LCD interface is very good at informing the user about what the unit is doing. This display information includes the IP address, if it’s connecting to the server, and other information prior to the typical status display.
Once set up there are several features that make this almost as good as a phone. When it’s connected to that configured network, prior to fully booting, there’s a 60-second timer before the web server shuts down and scanning begins. This timer reset if a user connects to the displayed IP and makes changes. Some of the neat features also include adding your WiGLE API key for manual uploads, and there’s also an option for it to automatically upload as well! If you want to download the files individually and upload them separately, this is also an option that’s pretty easy to do.

The hardware is brilliant, with several case front options. I chose the more temperature-friendly one with the hexagonal design, favoring airflow over style or weatherproofing.
Using the JHewittrev3 (mod)
Startup from off is a single tap of the right-side button. Booting shows the software version, connecting to NTP, the wardriver.uk server if enabled, and the option to press the power button during boot to reset to initial settings. Following that, and if a known network is found, any pending uploads will take place automatically if configured. Then starts the 60-second countdown for the web configuration, displaying said timer and local IP address. Make sure that you configure the device on a network with peer visibility…ask me how I know.
Finally you will be greeted with the rev3’s dashboard, displaying seen networks, bluetooth, GPS status, date, time, and temperature. For those who can see it unassisted you’ll find that there are no stats akin to the Android WiGLE client where it’s doing database comparisons. We’re just collecting networks and not doing any data analysis here, so you won’t see any statistics for your run…unless you want to fork the code and take that on yourself!
This fully-stocked unit is easy to handle for those with medium to large hands. The grip, as mentioned previously, is like a large FRS or HAM radio. It’s well contoured and light enough that walking with it in hand is easy. I have done this on several walks, antennas horizontal, and not found any fatigue. I did also add a small Scoche magnetic plate to the left side for car mounting. It’s mostly been used in a vent mount and hasn’t overwhelmed the mount or the vent.

Battery life is good, considering you have two big ESP32s and the BW16 onboard with a display and GPS. With what I expect to be a full battery charge I have exhausted the battery over the course of a long day. On my unit there is no way to see or measure the status of the batteries, but I have become more willing to power it down when I’m not moving or in a new area. This increases the number of files, but it is a good idea if you’re away from charging capability.
On that note, this diymore battery pack would be even cooler if it supported hot-swapping of the 18650 batteries, but its protection circuitry doesn’t allow for that. If you pull a battery out and place it back in the holder it will almost certainly not then be drawing current. To be fair, I’ve not tested pulling out one, putting it back in, then taking out the other. However, I’ve read the documentation and user comments about the required power cycle when charging. If you plug the pack in and the unit is on, it will charge and run as expected, but pulling the power will force a power cycle. This could be used strategically with an external battery pack to extend the run, of course, but remember that unplugging it or turning off the pack will restart it.
Performance
So, how well does it perform?
I’ve been using it with the AtomGPS and the two Android phones for a week now and I am impressed. I’m in the habit of uploading the Moto first, then the Pixel, then the rev3. I’ll add the AtomGPS less frequently simply because of the work involved. So far I am impressed!
If you are looking for a BT sponge this is not your device. The Pixel 6 and most phones will do a much better job at finding those than an ESP32 or BW16. As for the other numbers, well, they’re impressive. I’ve been seeing very solid network observations when analyzing the WiGLE upload statistics. The rev3 always has significant new networks to add even after the Moto and Pixel have submitted theirs. The antennas being a higher sensitivity is giving it a huge advantage, and making each trip a little more effective. This is what I wanted, and it’s really boosting my upload totals.
This is a sample of a recent run, with the Moto on the top line, Pixel in the middle, and JHewitt rev3 on the bottom. Those are some impressive numbers!

One of the neat things that having external antennae allow is for bigger, or different designs. Do you have an old AC1300 Nighthawk in a drawer? Grab some of those cool blade antenna and swap them in. Have an old Yagi in a closet, or maybe a magnetic omni? Let’s go for a roadtrip!
Conclusion
If you are new to WiGLE this isn’t the place to start IMO. The numbers-go-up pleasure from the Android app is quite alluring, even years later. Driving around a new neighborhood and visually seeing a change is nice, and you get a better understanding of what’s out there. It will drive you to get more, or better, devices to do one of two things: more input or consistency. Some phones are just bad, while others are mysterously over-performers. However, if you don’t have a phone with you, you’re breaking rule #1: Always Be Wardriving. Having the AtomGPS in a vehicle or backpack is easy. Same with a phone.